Content
Approach
I grew frustrated that most AI research was done on simulated environments. I wanted to see this technology used in the real world on systems we do not ourselves design nor understand – that is not even on robots.
The physical sciences seem fitting. In physics, chemistry, or biology, an important part of everyday research is to understand yet unknown systems. Scientists devise experiments and build instruments to query these systems with the aim to be able to model, and later predict, their evolution.
But because such systems are not yet fully understood, or are massively parallel, they cannot be simulated. There is no cheating with the physical sciences, you cannot speed up experiments, you cannot be 100% sure that you are controlling the right experimental variables, and you do not know the right answer. That is all the fun of it.
This is in sharp contrast with the simulation, big data, and controlled robotic problems AI algorithms are designed on and for. [1] If we ought to bring AI advances to experimental research in the labs, we need to drop the habit of thinking that experiments are free, unlimited, and well defined. That habit comes from the extraordinary power of computers and can sometime turn AI research into a parameter tuning and stacking game.
Interestingly, a subfield of robotics, called developmental robotics, imposes itself similar constraints. Their aim is to build a robot that can learn like a child. A child has real world constraints, it has limited time to interact with the world and he has no complete built-in knowledge of the world around him. From his own body, to modern objects like smartphones and bikes, a child has to learn it all in a few years by interacting with the world. To do so a child constantly devises his own experiments to test the world around him, much like a scientist in its lab.
As it turns out, I pursued my PhD under the supervision of Pierre-Yves Oudeyer, one of the pioneers of this field. Once I connected the dots, an ocean of research directions opened to bring principles from developmental robotics into the physical sciences. How can a laboratory robot be curious and devise its own questions about a new systems? How could it learn a hierarchy of skills to produce increasingly more complex molecules autonomously? How could such machines learn from and collaborate with scientists? Could maturational constraints and the concept of embodiment help leverage the exploration power of algorithms on natural systems?
Hence came the decision to join a chemistry lab for a postdoc.
Team
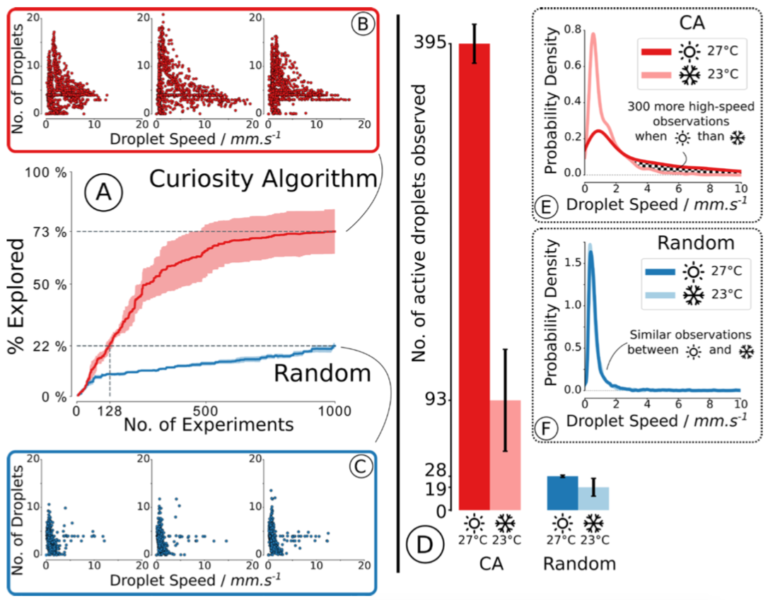
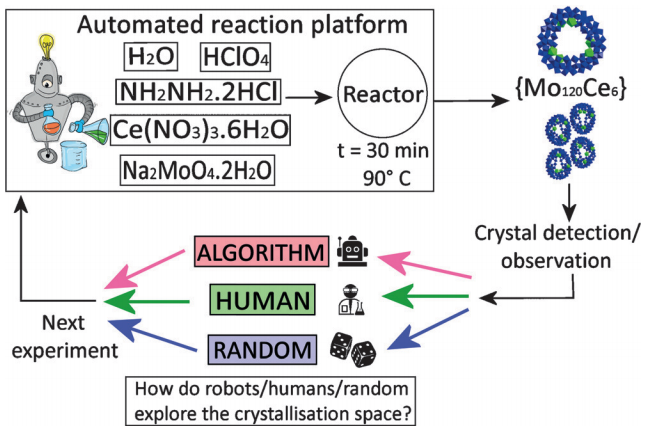
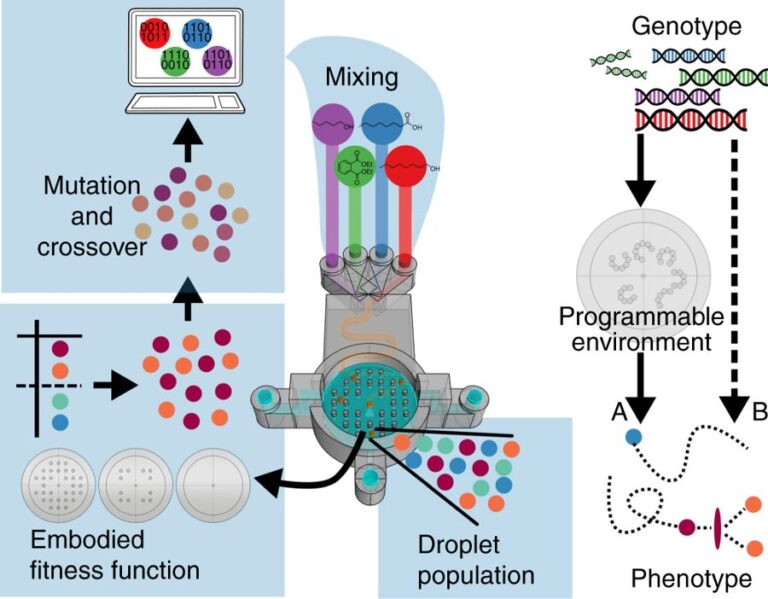
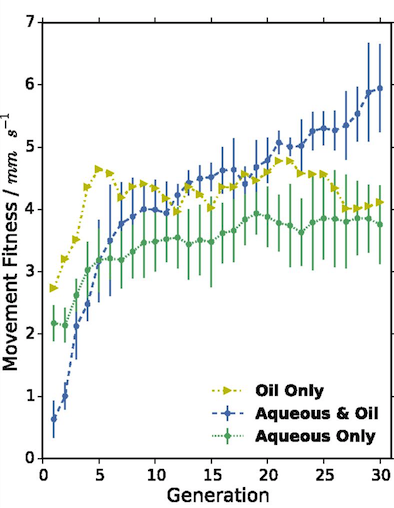
Lee Cronin, a pioneer in the digitization of chemistry, welcomed me into his lab and gave me the responsibility of an internal team to explore these questions. The group had already published a work showcasing the robotically assisted optimization of oil-in-water droplets, a suitable system for our experimentation.